轨迹限制器
本例程演示如何使用 librm 中的 TrajectoryLimiter 类实现基于梯形速度规划的轨迹限制。
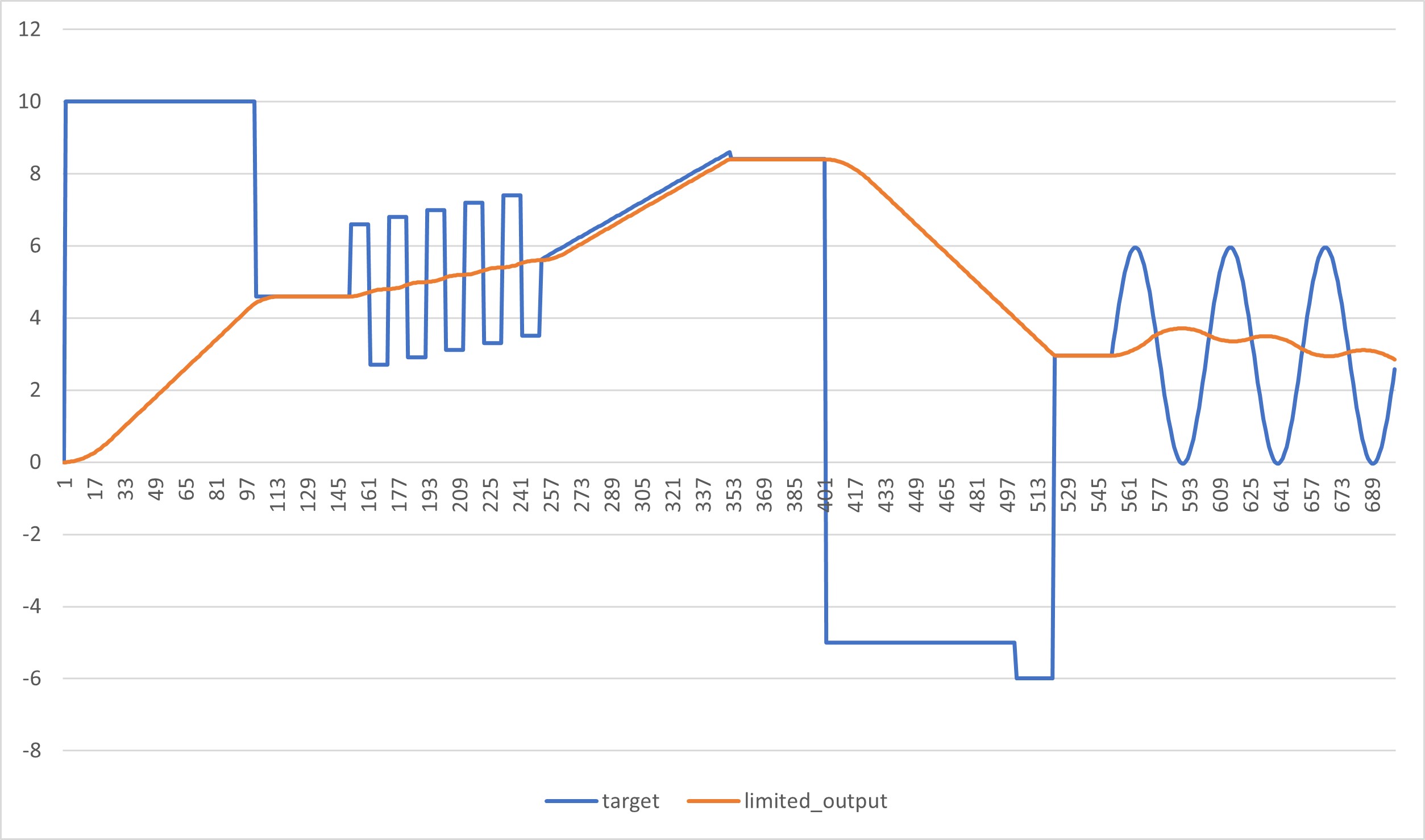
TrajectoryLimiter 限制信号的变化速度和加速度,使其不超过预设的约束。当输入信号本身未超出约束时,输出与输入相同;超出时则自动规划平滑轨迹。适用于云台角度平滑跟踪、机械臂关节控制等场景
代码示例
基础用法
#include <librm.hpp>
// 创建一个轨迹限制器
// 最大速度: 10 rad/s
// 最大加速度: 50 rad/s²
rm::modules::TrajectoryLimiter limiter(10.0f, 50.0f);
// 初始化位置为 0
limiter.ResetAt(0.0f);
// 设置目标位置为 5 rad
limiter.SetTarget(5.0f);
// 在控制循环中更新(假设控制周期为 1ms)
while (!limiter.IsAtTarget()) {
float current_pos = limiter.Update(0.001f); // dt = 1ms
// 使用 current_pos 控制电机或其他执行器
// ...
osDelay(1);
}
云台角度平滑控制
以下示例演示如何使用 TrajectoryLimiter 实现云台 yaw 轴的平滑跟踪:
#include "can.h"
#include "cmsis_os.h"
#include <librm.hpp>
extern "C" void GimbalYawTask(const void *pv_arg) {
// 初始化 CAN 和电机
rm::hal::Can can1(hcan1);
rm::device::GM6020 yaw_motor(can1, 1);
can1.SetFilter(0, 0);
can1.Begin();
// 创建轨迹限制器
// 最大速度: 360°/s (2π rad/s)
// 最大加速度: 1800°/s² (10π rad/s²)
rm::modules::TrajectoryLimiter limiter(6.28f, 31.4f);
// 创建位置 PID 控制器
rm::modules::PID pid(5, 0, 0, 30000, 0);
pid.SetCircular(true).SetCircularCycle(8191);
// 初始化限制器位置
limiter.ResetAt(yaw_motor.pos_rad());
const float dt = 0.001f; // 1ms 控制周期
for (;;) {
// 从遥控器或其他来源获取目标角度
float target_angle = GetTargetAngleFromRC();
// 设置目标位置
limiter.SetTarget(target_angle);
// 更新轨迹限制器,获取平滑后的目标位置
float smooth_target = limiter.Update(dt);
// PID 控制
pid.Update(smooth_target, yaw_motor.pos_rad());
yaw_motor.SetCurrent(static_cast<int16_t>(pid.out()));
// 发送控制指令
rm::device::DjiMotorBase::SendCommand();
osDelay(1);
}
}
动态改变目标位置
TrajectoryLimiter 可以随时改变目标位置,限制器会自动规划新的轨迹:
rm::modules::TrajectoryLimiter limiter(10.0f, 50.0f);
limiter.ResetAt(0.0f);
// 第一个目标
limiter.SetTarget(5.0f);
for (int i = 0; i < 1000; i++) {
// 在运动过程中改变目标
if (i == 500) {
limiter.SetTarget(-3.0f); // 改变目标位置
}
float current_pos = limiter.Update(0.001f);
// 使用 current_pos...
osDelay(1);
}
检查是否到达目标
rm::modules::TrajectoryLimiter limiter(10.0f, 50.0f);
limiter.ResetAt(0.0f);
limiter.SetTarget(5.0f);
while (true) {
float current_pos = limiter.Update(0.001f);
// 检查是否到达目标(默认容差 1e-6)
if (limiter.IsAtTarget()) {
// 已到达目标,可以执行下一步操作
break;
}
// 也可以自定义容差
if (limiter.IsAtTarget(0.01f)) {
// 在 0.01 的容差范围内
break;
}
osDelay(1);
}
获取当前状态
rm::modules::TrajectoryLimiter limiter(10.0f, 50.0f);
limiter.ResetAt(0.0f);
limiter.SetTarget(5.0f);
for (int i = 0; i < 100; i++) {
limiter.Update(0.001f);
// 获取当前位置
float pos = limiter.current_position();
// 获取当前速度
float vel = limiter.current_velocity();
// 获取目标位置
float target = limiter.target_position();
printf("pos=%.3f, vel=%.3f, target=%.3f\n", pos, vel, target);
osDelay(1);
}
API 参考
构造函数
TrajectoryLimiter(f32 max_vel, f32 max_accel);
max_vel: 最大速度(单位:位置/秒)max_accel: 最大加速度(单位:位置/秒²)
主要方法
| 方法 | 说明 |
|---|---|
void SetTarget(f32 target) | 设置目标位置 |
void ResetAt(f32 position) | 重置限制器并设置初始位置 |
f32 Update(f32 dt) | 更新位置和速度,返回当前位置 |
bool IsAtTarget(f32 tolerance = 1e-6f) | 检查是否到达目标位置 |
f32 current_position() | 获取当前位置 |
f32 current_velocity() | 获取当前速度 |
f32 target_position() | 获取目标位置 |
注意事项
warning
dt参数必须为正数且不能太小(至少大于 1e-6 秒)- 不要在限制器更新过程中修改最大速度和最大加速度参数
- 确保控制周期稳定,避免
dt变化过大
tip
- 对于角度控制,建议配合 PID 控制器的循环模式使用
- 可以根据实际应用调整最大速度和加速度参数以获得最佳性能
- 使用
IsAtTarget()方法时,可以根据实际精度要求调整容差参数